Виды роботов в медицине. Обзор состояния робототехники в восстановительной медицине. Роботы-тренажеры в виде собак и кошек
Робототехника сегодня завоевывает разнообразные области, в которых, казалось бы, всегда будут трудиться люди. Одна из этих областей – медицина. Сегодня роботы делают сложные операции или заменяют органы, жизненно важные для человека. Итак, представляем вам 10 медицинских роботов.
Cue
Биолог Аюб Кхаттак и дизайнер Клинт Север создали устройство, которое должно помочь людям, чувствующим недомогание. Аппарат Cue, анализирующий состояние здоровье своего пользователя, обладает компактными габаритами, что упрощает его повседневное использование. На данный момент Cue показывает уровень витамина D, тестостерона, а также умеет определять способность человека к воспроизводству. Кроме того, аппарат выявляет у своего хозяина наличие таких заболеваний, как ВИЧ и грипп. Для того, чтобы провести анализ, в специальный картридж необходимо поместить образец слюны, крови или слизистой оболочки пользователя. Анализ производится в течение нескольких минут.
Ubot-5
В Массачусетском университете был создан робот, помогающий людям пережить последствия инсульта. Так, в 2013 году Ubot-5 помог восстановиться 72-летнему мужчине, имеющему проблемы с сердцем. Робот умеет оценивать состояние речи больного, а также делать пациенту физиотерапию. По итогам роботы Ubot-5 с больным был выявлен положительный эффект как в области движения, так и в области речи больного.
Argus II
Компанией Second Sight разработала устройство, которое способно частично восстановить зрение незрячим. Вначале необходимо имплантировать специальную матрицу электродов. Кроме того, необходимы солнечные очки с миниатюрной видеокамерой. Изображение, которое попадает в объектив этой видеокамеры, передается к визуальному процессору, который находится на поясе пользователя. Далее визуальный процессор посылает данные изображения на очки в виде 60-пиксельных черно-белых изображений, которые, в свою очередь, передаются на упомянутые выше матрицы. Электроды этих матриц воздействует на фоторецепторы и клетки, передающие сигналы от фоторецепторов в зрительный нерв. Безусловно, Argus II передает пользователю изображения в виде довольно грубых форм, однако данное устройство помогает незрячим ориентироваться в пространстве.
Lightbot
Конструкторы из японской компании NSK создали робота-поводыря Lightbot, способного помогать незрячим людям, а также людям, имеющим проблемы с передвижением. Ориентируется Lightbot в окружающем мире, используя трехмерный датчик. Робот умеет распозновать препятствие, передвигается по лестнице как вверх, так и вниз. Благодаря колесам Lightbot умеет не только шагать, но и ездить. Кстати, скорость движения робота зависит от скорости движения использующего его человека.
Robocast
Ученые из Великобритании, Германии, Италии и Израиля создали робототехническую систему Robocast, призванную помочь нейрохирургам. Основная задача этой системы – помочь во время операций по трепанации мозга. Как известно, данная операция является крайне опасной и трудоёмкой: ошибка на миллиметр может привести к необратимым повреждением головного мозга. Robocast обладает системой «мозг – компьютер», которая включает в себя автоматический планировщик траектории инструмента, управляющий механизм с обратной связью, набор датчиков операционного поля, микроконтроллеры и двух роботов. Таким образом, большой робот контролирует своего маленького коллегу, размещает его в необходимом месте и координирует его в нужном направлении. Маленький робот необходим для внедрения хирургического инструмента в мозг пациента. Кроме того, Robocast всегда можно перевести на ручное управление.
Veebot
Обычный врач далеко не всегда попадает в вену с первого раза. Поэтому для забора крови компания Mountain View был создан робот Veebot. Робот определяет место нахождения вены в руке пациента, используя камеру, специальное программное обеспечение и инфракрасную подсветку, а также Weebot исследует вену при помощи ультразвука. Таким образом робот определяет, что толщина вены достаточна для прокола.
7 Finger Robot
Ученые из Массачусетского института технологий создали специальное устройство, увеличивающее количество пальцев на руке до семи. В первую очередь, дополнительные пальцы предназначены для людей, которым приходится пользоваться лишь одной рукой. Движениями механических пальцев управляют биологические пальцы пользователя. Другими словами, дополнительные пальцы копируют те движения, которые делают человек (например, захватывающее движение). Также, благодаря своим сервомоторам, дополнительные пальцы способны развивать силу, равную силе обычных пальцев.
Робот-сиделка VGo
Американской компанией Vgo Communication был создан робот-сиделка для больных, прошедший тестирование в одной из бостонских детских больниц. Основные задачи робота VGo заключаются в том, чтобы помочь в восстановлении больным, а также обеспечить им связь с внешним миром. Например, благодаря роботу VGo, дети, проходящие лечение в больнице, могут дистанционно посещать школу. Кроме того, робот позволяет администрации больницы контролировать деятельность своих подчиненных. Рост VGo составляет 164 сантиметров, передвигается он на четырех колесах. Ещё VGo может делать анализ крови пациентов.
Amigo
Ученые Лестерского университета (Великобритания) сконструировали медицинского робота Amigo, задачей которого является лечение аритмии сердца. Робот может помочь врачам вводить катетер к поврежденным участкам сердца. Amigo также способен подать больному стакан воды. Робот подключен к единой сети, в которой объединены разнообразные роботы по всему миру. Цель данной сети состоит в объединении информации о возможностях роботов, а также в создании программного обеспечения и навигационных карт, что должно сделать этих роботов доступнее в использовании.
Jukusui-Kun
Доктор Кабе, работающий в лаборатории японского университета Waseda, создал робота-подушку под названием Jukusui-Kun. Подушка выглядит как мягкая игрушка-медведь. Основные пользователи Jukusui-Kun – люди, страдающие синдромом апноэ сна. Во время сна такие люди испытывают трудности с дыханием – их мучает хронический храп. К робоподушке прилагаются беспроводной датчик, который подкладывается под простынь, беспроводной датчик, который прикрепляется к пальцу пациента, а также микрофон. Подушка анализирует состояние пользователя во время сна, уровень шума, движения спящего, а также количество кислорода в крови. На движения спящего Jakusui-Kun реагирует поглаживанием, после чего человек принимает позу, наиболее благоприятную для сна.
В начале 2018 года стало известно об использовании роботов в качестве медсестер. Проект анонсирован в больнице города Нагоя (Япония), в котором находится большой музей, посвященный робототехнике.
В феврале 2018 года в Университетской клинике Нагои (Nagoya University Hospital) запустит четырех роботов Toyota , которые станут помощниками медицинскому персоналу. В частности, на это автоматизированное оборудование возложат функции раздачи медикаментов больным в палатах, доставку анализов и т. п. Роботы смогут передвигаться как по этажу, так и между различными отделениями, которые располагаются на разных этажах.
Каждый робот имеет высоту 125 см, ширину 50 см и глубину 63 см. Максимальная скорость передвижения составляет 3,6 км/ч, максимальный вес перевозимого груза - 30 кг.
Как отмечает издание Engadget, по сути, роботы представляют собой портативные холодильники объемом 90 литров, которые оснащены радарами и камерами для передвижения по медицинскому учреждению. Роботы объезжают людей, а в случае столкновения приносят извинения и вежливо просят пройти. Работники клиники могут вызывать роботов к себе и назначать пункты следования при помощи планшетных компьютеров.
Роботы разработаны совместными усилиями специалистов Университетской клиники Нагои и подразделения Toyota Industries (производит автозапчасти и электронику). Пробный запуск устройств будет проходить в ночную смену - в период с 17:00 до 8:00, когда меньше людей ходят по этажам. В случае успешного тестирования роботы могут быть развернуты в других больницах.
Использование роботов в домах престарелых в Японии
В ноябре 2017 года стало известно о тестировании роботов в нескольких тысячах домов престарелых в Японии . Искусственный интеллект и механические ассистенты помогают персоналу ухаживать за людьми в возрасте и заменяют последним собеседников.
По прогнозам японского правительства, объем рынка роботов, заменяющих медицинских работников для ухода за больными, к 2020 году достигнет 54,3 млрд иен (около $480 млн), увеличившись втрое по сравнению с показателем 2015-го. Расходы здесь гораздо ниже по сравнению с роботами, применяемыми на предприятиях и в сфере услуг.

Одной из причин такого отставания спроса на автоматизированное оборудование, присматривающего за здоровьем людей, является дороговизна. Несмотря на достаточно высокий уровень жизни в Японии, далеко не все пенсионеры могут позволить себе покупку робота .
В Японии предусмотрены субсидии для разработчиков роботов. Дополнительные льготы предоставляются при поставках устройств в лечебно-реабилитационные центры для престарелых и инвалидов. Около 5 тыс. таких учреждений к ноябрю 2017 года задействуют роботов.
Они используются для общения с пациентами, проведения лечебной физкультуры, обхода больничных коридоров для мониторинга за экстренными ситуациями, а робот-пес Aibo от Sony вовсе заменяет домашнего питомца.
В домах престарелых все сильнее распространяются системы, помогающие медперсоналу ухаживать за пожилыми людьми: например, поднимать и перемещать парализованных по этажу.
Роботы еще не смогут полностью заменить людей в социальных учреждениях, однако позволяют персоналу сосредоточиться на общении и других задачах, требующих большего вовлечения, отдав бытовые дела на попечение гаджетов. Кроме того, как показало общенациональное исследование, примерно треть жителей Японии, пользующихся роботами, в итоге стали более активными и независимыми, отмечает издание The Economist.
Прогноз IDC по использованию роботов в медицине
К 2020 году больницы станут активнее использовать роботов. Планируется как клиническое применение, так и автоматизация с их помощью несложных задач, сообщает издание Healthcare IT News со ссылкой на проведенное в 2017 году исследование IDC .

Опрос IDC среди лечебных учреждений на 200 и более койко-мест позволил оценить планы внедрения роботов и дронов . Почти треть респондентов заявили, что уже используют у себя роботов. Такая практика станет обычным явлением для учреждений здравоохранения, как только в больницах и клиниках поймут, каким образом внедрение роботов способно помочь автоматизировать процессы, снизить издержки и улучшить качество оказания медицинских услуг. По оценкам IDC, повсеместное распространение роботов в больницах США произойдет в период от одного года до трех лет.
Интересно, что в отличие от роботов, которые уже успели проникнуть в сферу здравоохранения, беспилотные летательные аппараты (БПЛА) пока не используются лечебными учреждениями. Во всяком случае, такого опыта не оказалось ни у одной из больниц, участвовавших в опросе IDC.
Тем не менее, аналитики убеждены, что в следующие три-пять лет дроны также найдут применение в здравоохранении.
То, как беспилотники могут пригодиться для оказания медицинской помощи, в июне 2017 года стало известно из опыта шведских ученых. С помощью экспериментальных полетов БПЛА специалисты продемонстрировали, что дроны способны на 17 минут быстрее доставлять в нужную точку автоматический внешний дефибриллятор для помощи пациенту, нежели это происходит в случае с обычной машиной скорой помощи.
Опубликовано: Архипов М.В., Головин В.Ф., Журавлев В.В. Мехатроника, автоматизация, управление, № 8, М., 2011, с. 42 – 50Обзор состояния робототехники в восстановительной медицине
1. Классификация медицинских роботов
Чтобы систематизировать известные и возможные робототехнические системы (РТС) в медицине предложен ряд классификаций . В качестве признаков классификации использованы следующие: инвазивность процедуры, безопасность, мобильность, эргономичность, контроль как управление или диагностика. Один из вариантов классификации, учитывающий последние достижения в медицинской робототехнике приведен на рис.1 . Основные три класса – это роботы для восстановительной медицины, роботы для жизнеобеспечения и роботы для хирургии, терапии и диагностики. Они представляют собой основные области медицинской робототехники, хотя эти классы и их подклассы не являются независимыми по указанным выше признакам. Далее в разделах 3 – 5 рассматриваются представители обозначенных в классификации подклассов восстановительной медицины.
Рис.1
2. Концепция разработки и внедрения роботов в восстановительной медицине для здоровых людей
Восстановительная медицина представляет систему медицинской деятельности, направленной на диагностику функциональных резервов, сохранение и восстановление здоровья человека посредством оздоровления и медицинской реабилитации. Под оздоровлением следует понимать комплекс профилактических мероприятий, направленных на восстановление сниженных функциональных резервов и адаптивных возможностей организма у практически здоровых лиц . Особенную роль профилактической медицины отмечал Нобелевский лауреат И.П. Павлов (рис.2). По его словам: “Профилактическая медицина достигает своих социальных целей только в случае перехода от медицины патологии к медицине здоровья здоровых”.

Рис.2
Понятие восстановительная медицина отличается по существу от понятия медицинская реабилитация, которая представляет комплекс диагностических и лечебно-профилактических мероприятий, направленных на восстановление или компенсацию нарушенных функций организма человека и трудоспособности у больных лиц и инвалидов.
Реабилитация – это закрепление лечебного эффекта в процессе выздоровления больного после болезни. В отличие от реабилитации, обеспечивающей восстановление здоровья у больного человека, восстановительная медицина направлена на воспроизводство утраченных резервов здоровья. Лечебно-оздоровительный арсенал восстановительной медицины обеспечивает человеку социально-творческую активность в своей профессии, то есть работоспособность в тех условиях, в которых протекает его профессиональная деятельность. Реабилитация по преимуществу сосредоточена на органной патологии, и соответственно её критериальный аппарат оценивает степень возвращения к норме. Методический инструментарий восстановительной медицины перенацеливается с поиска симптомов болезни на оценку резервных функциональных возможностей организма, именно к тем нагрузкам, условиям труда, в которых работает человек.
В основу концепции развития здравоохранения и медицинской науки в Российской Федерации на период до 2010 г. положена здоровьецентрическая модель системы здравоохранения, разработанная РНЦВМиК под руководством академика А.Н.Разумова (рис.3). Суть модели состоит в акценте на сохранение здоровья здорового человека а, следовательно, на восстановительную медицину .

Рис.3
В дальнейшем большинство исследований этой монографии будет связано с контингентом не только травмированных в военных действиях, на производстве, в спорте людей, больных детским церебральным параличом, постинсультных больных, но и людей здоровых, устающих от физической и умственной деятельности, снижающих свою работоспособность. Например, преподаватели и студенты университетов. Уместно сказать здесь о развивающейся в настоящее время системе интенсивного информатизированного обучения, которая для повышения эффективности обучения предполагает концентрацию усилий как обучающихся, так и преподавателей без ущерба их здоровья. Для них необходимой является рассматриваемая в монографии восстановительная медицина.
Восстановительная медицина включает ряд терапий, в том числе, немедикоментозные, одним из видов которых является механотерапия. Среди множества известных средств механотерапии наибольшими возможностями обладает робототехника.
О необходимости применения аппаратных средств оздоровительного массажа именно для здоровых людей писал в своей диссертации “Материалы к вопросу о действии массажа на здоровых людей” в 1882 г русский учёный Н.В. Заблудовский (рис.4). “Нельзя ли воспользоваться усовершенствованиями механики для устройства таких машин, которые заменили бы действия рук, или не будет ли даже действие машин предпочтительнее действия рук? Стоило бы изобрести машину, силу которой можно было бы в каждый момент определять в цифрах и вместо работы массёра, зависящей от субъективного мышечного чувства, иметь дело с работой, выраженной в цифрах. Другими словами – вместо того, чтобы количество целебного средства взять на глазок, взвешивать его на точных весах”.
Рис.4
В те времена это было фантастикой, и учёный лишь мечтал о возможности дозирования воздействий на аппаратных средствах будущего. В настоящее время мечты великого предсказателя могут быть реализованы при обращении к развитой адаптивной интеллектуальной робототехнике. Проблема для медицины, в первую очередь, состоит в развитии концепции Н.В. Заблудовского о новом подходе к физической культуре человека с участием не только волевых и пассивных движений, но и массажа. Массаж может иметь как функцию релаксации, так и мобилизации. В оптимальном объединении этих функций физическая культура сможет в большей степени способствовать сохранению и повышению запасов здоровья и повышению работоспособности в физическом и умственном труде.
Поэтому существом концепции разработки и внедрения роботов в ВМ для здоровых людей является использование адаптивных и интеллектуальных роботов в сочетании с другими видами терапий: аромо-, мело-, психотерапией для сохранения повышения запасов здоровья людей, повышения их работоспособности.
Конечно, робототехническая система является автоматизированным средством, лишь временно работая автоматически, подчиняясь человеку на уровне принятия сложных решений и являясь разумным, а не только физическим помощником.
В соответствии с классификацией, предложенной выше, проведен обзор состояния робототехники для восстановительной медицины по трём направлениям: манипуляции на суставах или движения конечностей в суставах; манипуляции на мягких тканях, т.е. разнообразный массаж; активные и биоуправляемые протезы.
3. Роботы для выполнения движений конечностей в суставах
Движения конечностей в суставах руками врача широко используются в спортивной, восстановительной медицине, в лечении и обучении пациентов с последствиями инсульта, детского церебрального паралича. Пассивные и активные движения конечностей в суставах часто выполняются вместе с массажем, в том числе, и в оздоровительных целях. Механотерапия заменяет руки врача руками манипулятора. Одни из первых работ, в которых был предложен манипуляционный шестиприводной робот для массажа и движения конечностей в суставах появились в 1997г. . Позднее появляются одноприводные роботы американской фирмы ”Biodex ”, швейцарской фирмы “Con -Trex ”и четырёхприводной робот швейцарской фирмы “Lokomat ” .
Робот швейцарской фирмы “Lokomat” является наиболее ярким представителем подкласса реабилитационных роботов для выполнения движений конечностей в бедренных, коленных и голеностопных суставах. Существует концепция нейропластичности, которая предполагает "постановку задачи специфического обучения" и заключается в том, что с помощью многократно повторяющихся тренировок можно улучшить повседневную двигательную активность у пациентов с неврологическими нарушениями. Роботизированная терапия на комплексе Lokomat отвечает вышеописанным требованиям и дает возможность проведения интенсивной локомоторной терапии с обратной связью. Общий вид комплекса представлен на рис. 5.

Рис. 5
Lokomat состоит из четырёх приводов для навязывания движений ходьбы и системы разгрузки веса пациента и беговой дорожки.
Пациенты,
находящиеся в инвалидном кресле, могут
быть без особого
труда переведены на
полотно беговой дорожки и закреплены
с помощью специальных фиксаторов.
Управляемые компьютером приводы
синхронизированы со скоростью беговой
дорожки. Они задают ногам пациента
траекторию движения, которая формирует
ходьбу, близкую к естественной.
Усиленная мотивация пациента осуществляется за счет управления нагрузкой с помощью биологической обратной связи при выводе текущего состояния на монитор (рис. 6).

Рис. 6
Для задач ортопедии (взрослая и детская), спортивной медицины, производственной реабилитации, профилактики и лечения остеоартритов известен робот американской фирмы “Biodex ”. Принцип действия основан на электронной динамометрии. Система обеспечивает быструю и точную диагностику, лечение и документирование нарушений, являющихся причиной функциональных расстройств мышц и суставов. Система позволяет проводить мобилизацию суставов в направлении сгибание / разгибание, отведение / приведение и ротация, что необходимо для полноценного восстановления их утраченных функций.
В комплектацию входит набор приспособлений для работы с тазобедренным, коленным, плечевым и локтевым суставами, а также с голеностопом и запястьем. Общий вид системы, работающей с верхними и нижними конечностями, представлен на рис. 7.

Рис. 7
Роботы для восстановления верхних и нижних конечностей были представлены на симпозиуме по медицинской робототехнике в Пенсильвании . На рис.8 слева: манипулятор GENTLE /s , разработка University of Reading , Великобритания; в центре: манипулятор ARMguide , разработка Rehabilitation Institute of Chicago ; справа: манипулятор Manipulandum , разработка Rehabilitation Institute of Chicago .

Рис.8 Манипуляторы для восстановления верхних конечностей
На рис.9 вверху слева: робот AutoAmbulator , разработка HealthSouth , США; вверху справа: тренажёр для ходьбы, разработка University of California , США); внизу слева: робот GaitMaster 2, разработка University of Tsukuba , Япония); внизу справа: робот для движений конечностей, а также для массажа, разработка Российской Академии Наук) подробно описанная ниже.

Рис.9 Роботы для восстановления суставов нижних конечностей
Воздействия с помощью рассмотренных выше роботов относят к механотерапии. Механотерапия - метод лечебной физкультуры, основанный на выполнении дозированных движений (преимущественно для отдельных сегментов конечностей), выполняемых с помощью специальных приспособлений. Механотерапия применяется в качестве восстановительного лечения при различных двигательных расстройствах, когда необходимо увеличить амплитуду движений в суставах и силу определенных мышечных групп. На некоторых аппаратах можно заниматься сразу после оперативного вмешательства. Выбор движений, выполняемых на механотерапевтических аппаратах, определяется характером ограничения движений и анатомическими особенностями сустава.
Роботы для выполнения манипуляций на мягких тканях (роботы для массажа)
История появления роботов в ВМ для массажа такова. В 1997 г. на втором форуме IARP по медицинской робототехнике была представлена только одна работа с использованием робототехники для восстановительной медицины – робот для массажа . В 2002 г. на сайте голландской фирмы появился робот для массажа Tickle - щекочущая букашка. В 2003 г. появился российский патент – робот для шлейф-массажа . В 2005 г. на сайте Силиконовой долины появилось сообщение об использовании робота Puma для массажа. За основу этого робота была взята идея, изложенная в российской работе . К сожалению, развитие этой разработки неизвестно. Перечисленные выше работы представляют большинство известных роботов для массажа, если не иметь ввиду многочисленных аппаратных средства для массажа.
Разнообразные аппаратные средства издавна применяются для облегчения труда массажиста, предупреждения профессиональных заболеваний кистей его рук. Простейшие из них: вибраторы, роллеры, насадки для акупунктуры и акупрессуры представляют средства механизации, которые перемещает массажист (рис. 10).


Рис.10. Аппаратные средства восстановительной медицины
Следует заметить, что робот может быть носителем упомянутых аппаратных средств.
Более сложными являются средства автоматизации, например, массажные кресла. Массажные кресла (рис.11) в качестве актуаторов имеют воздушные подушки с регулируемым давлением, ролики с управляемыми усилиями прижатия. Зоны воздействия массажа: шейно-плечевой отдел, спина, поясничный отдел, ягодицы, бёдра, голени, ступни. Виды массажа: разминающий, похлопывающий, поколачивающий, вибрационный, Шиатсу. С пульта управления можно установить желаемый уровень интенсивности массажа.

Рис.11
Пользуются популярностью полуавтоматические аппаратные средства массажа, частично разгружающие массажиста. На рис.12 показана рука производства американской фирмы Meilis, помогающая выполнять прижимные приёмы.
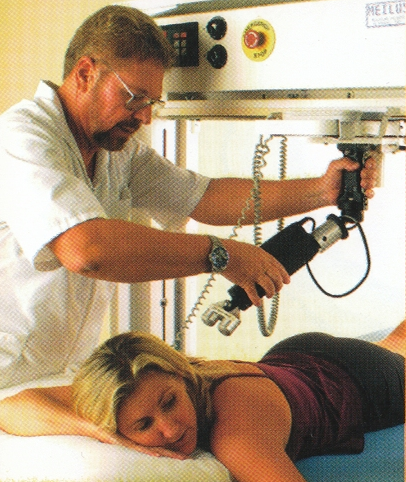
Рис.12
Робот голландской фирмы Tickle весьма прост по конструкции (рис. 13). В металлическом корпусе находятся два электромотора, аккумуляторная батарея и четыре датчика, позволяющих следить за наклоном поверхности, по которой передвигается робот-массажист. Движение осуществляется с помощью двух силиконовых "гусениц", покрытых выступами, создающими массажный эффект. Принцип движения робота напоминает принцип движения танка: каждый из моторов приводит в движение свою гусеницу. Воздействия робота – поглаживающие и щекочушие, вызывающие эффект релаксации.

Рис.13
Робот для шлейф-массажа выполняет плоскостное, непрерывное, прямолинейное поглаживание на больших поверхностях тела (спина, грудь, живот, конечности). Такого рода поверхностное поглаживание отличается особо нежными и легкими движениями, оказывающими успокоительное воздействие на нервную систему, вызывает мышечное расслабление и улучшение кровообращения. Конструкция робота представляет каретку с электродвигателем, перемещающеюся по траверсе вдоль тела пациента (рис.14). Траверса профилирована по рельефу задней поверхности номинального пациента и не может быть перепрограммирована. С каретки свешиваются поглаживающие щётки и прижимаются к пациенту упругими пластинками.

Рис.14
В 2007 году в Японии разработан
робот для массажа лица WAO-1 (Waseda Asahi Oral
Rehabilitation Robot 1). Робот (рис.15) оснащен двумя
50-сантиметровыми механическими руками,
которые массируют лицо пациента с обеих
сторон. Безопасность обеспечивается
силометрической ограничительной
системой, которая раздвигает руки робота
в стороны, стоит ему только приложить
слишком большое усилие.
Лицевой
массаж признан весьма эффективным
средством борьбы с сухостью во рту,
поскольку стимулирует дополнительное
слюноотделение, а также помогает
исправить нарушения ротовой структуры.

Рис. 15
Эффективность аппаратных средств массажа определяется адекватностью механического контакта с пациентом. Этот контакт осуществляется через инструмент аппаратного средства. Поэтому в техниках, воспроизводящих руки человека, инструмент должен имитировать контактные свойства человеческой руки: упругость, теплоту, влажность, фрикционные свойства (шероховатость, гладкость, скользкость), координационные возможности (многопальцевость, способность захватывать). В большей степени перечисленные свойства может обеспечить многосуставный манипуляционный робот.
В Московском Государственном Индустриальном Университете разработан робот для выполнения приёмов массажа и движения конечностей в суставах . Основой этого робота является промышленный робот РМ-01, манипуляционная рука которого антропоморфна по размерам и кинематике (рис.16). В контакте с телом робот развивает усилие до 60 Н. Необходимые усилия развиваются и контролируется за счёт позиционно – силовой системы управления, расширяющей возможности штатного робота.

Рис.16
Шестиприводной робот с указанными данными может выполнять множество известных манипуляций непосредственно на мягких тканях, т.е. разнообразный массаж, а также манипуляции на суставах в виде пассивных и активных движений конечностей, постизометрической релаксации в виде сочетаний нагружений и разгрузок мышц конечностей. На рис.17 робот выполняет выжимание длинных мышц спины девочки.

Рис.17
Активные биоуправляемые протезы верхних и нижних конечностей
Биопротезирование верхних и нижних конечностей, утраченных в результате травм или болезни опирается на более простые решения. Некоторые простейшие решения в какой-то степени лишь эстетически восстанавливают внешность конечностей, другие решения восстанавливают некоторые функции. На рис.18 приведена классификация протезов, в которой выделены классы активных и биоуправляемых протезов.

Рис.18
Разработанные на основе теории баллистических синергий , протезы нижних конечностей не являются активными и не используют биосигналы, но эффективно используют упругость пружин протезов.
В тяговых протезах верхних конечностей, вначале как пассивных, движения схвата кисти вызывались за счёт дополнительных движений сохранившейся части руки или за счёт движения туловища. Передающим звеном вначале были гибкие тяги, впоследствии появились активные тяговые протезы, в которых движения тяг воспроизводились встроенными двигателями.
Активными, но не биоуправляемыми, являются миотонические протезы, в которых управляющими сигналами являются усилия инвалида. Датчики в виде микровыключателей или тензоэлементов измеряют эти усилия и передают на исполнительные приводы кисти.
Рассмотренные способы протезирования без использования биосигналов имеют ряд недостатков. Управляющие тяги обременяют инвалида, затрудняют движения плечевого пояса, число управляющих команд так же, как при миотоническом управлении, ограничено (одна-две команды). Помехами для управления являются случайные внешние толчки в гильзу культи протеза. Тем не менее, простейшие протезы разработаны в виде модульных конструкций и выпускаются серийно .
Развитию биоуправляемых протезов способствовали достижения в области электрофизиологии, биомеханики, микроэлектроники, адаптивных систем управления с обратными связями.
В настоящее время известна немецкая фирма “Otto Bock ”, серийно выпускающая пассивные и активные протезы. На рис.19 приведен активный протез коленного сустава.

Рис.19
Наиболее значительные результаты по биопротезированию в 70-80-х годах в России известны по работам ЦНИИ ПП . В работах ЦНИИПП родилось принципиально новое направление в протезировании конечностей - создание протезов с биоэлект-рической системой управления или биоуправляемых протезов. Сущность нового принципа построения искусственных конеч-ностей состоит в том, что управление внешними источниками энергии, за счет которой работает протез, в своей основе по-добно естественной координации движений здорового человека.
В живом организме управляющие воздействия передаются мышцам посредством биоэлектрических импульсов, отража-ющих команды центральной нервной системы. Подобно этому в протезе руки с биоэлектрическим управлением роль команд-ных сигналов выполняют биотоки, отводимые от усеченных мышц культи. Механизмом, исполняющим команды, является искусственная кисть, снабженная малогабаритным электри-ческим приводом с автономным питанием.
По материалам симпозиума 2004 г. в Пенсильвании известны активные протезы и экзоскелетоны, приведенные на рис.20.

Рис.20 Активные протезы и экзоскелетоны
Одними из первых работ в области активных протезов и экзоскелетонов являются работы Миомира Вукобратовича . Под его руководством были разработаны экзоскелетоны, в одном варианте с электрическими, в другом с пневматическими приводами тазобедренного, коленного и голеностопного суставов для обеих ног пациента (рис.21). Экзоскелетон предназначался для усиления дистрофически слабых мышц нижних конечностей человека во время ходьбы.

Рис.21
Японская компания Matsushita разработала роботизированный костюм, который поможет реабилитации частично парализованных людей (рис.22). Когда человек, страдающий параличом на одну руку, делает движение здоровой рукой, парализованная рука делает то же самое движение, напрягая и сгибая компрессоры, которые играют роль мускулатуры. Повторяя движения здоровой руки, человек в роботизированном костюме может тренировать свою больную руку до восстановления нормального функционирования конечности.

Рис.22
Костюм весит 1,8 кг. Он был разработан совместно компанией
Были проведены испытания костюма в госпитале, и планируется поставить производство на коммерческую основу. Приблизительная цена костюма для использования в реабилитационных клиниках составит 17000 долл., для домашнего использования – около 2000 долл.
Другая токийская компания
Cyberdine разработала автоматизированный
костюм HAL
(Hybrid Assistive Limb) (рис. 23), который помогает
пожилым людям и людям с ограниченными
способностями ходить. Устройство с
датчиками будет доступно в Японии за
арендную плату, составляющую 2200$ в месяц.
22-фунтовая компьютерная система,
работающая от батареи, крепится к талии.
Она управляет приводами на скобах,
которые крепятся ремнями к бедрам и
коленям, и обеспечивают автоматизированную
помощь во время ходьбы.

Рис.23
Выводы
1. Судя по публикациям организаций- разработчиков и медицинских центров области применения медицинских роботов, в том числе для восстановительной медицины, расширяются и спрос на них увеличивается.
2. Медицинские роботы в сравнении другими аппаратными средствами имеют ряд преимуществ. Это – быстрая перепрограммируемость, высокая точность повторения движений, неутомимость, отсутствие субъективных факторов (добросовесность), дружественный интерфейс (психоэмоциональный контакт), партнёрство (для детей вовлечение в игры, в разнообразные движения, например, в утреннюю зарядку). Также адаптация к индивидуальным особенностям человека (позиционно-силовое управление), наличие интеллекта (накопление опыта, анализ, генерация программ), повышенная безопасность за счёт адаптации и интеллекта.
3. В сравнении с руками врача медицинские роботы сегодняшнего дня часто уступают в чувствительности и координации в сложных движениях.
4. Концепция разработки и внедрения роботов в ВМ для здоровых людей состоит в применении адаптивных и интеллектуальных роботов для сохранения и увеличения запасов здоровья населения, восстановлении работоспособности трудящихся.
5. При разработке и внедрении роботов в ВМ следует делать компромиссный выбор между многофункциональными роботами и экономичными специализированными с малым числом приводов.
6. Для разработанных аппаратных средств ВМ, включая роботы, манипулирующие на мягких тканях и суставах, активные и биоуправляемые протезы, эффективно используется тактильная и силометрическая информация, как для разомкнутых, так и для замкнутых силовых и позиционно-силовых систем управления.
7.Биоинформация используется непосредственно как управляющие сигналы, образует замкнутые системы или образует биологические обратные связи через зрение и нервную систему человека.
Список литературы
Головин В.Ф. Проблемы развития робототехники в восстановительной медицине. Труды конференции “Мехатроника”, СПб., 2008
Саврасов Г.В. Медицинская робототехника: состояние, проблемы и общие принципы проектирования. // Вестник МГТУ им. Баумана Н.Э. Спецвыпуск «Биомедицинская техника и технология, серия «Приборостроение», 1998
Разумов А.Н., Головин В.Ф. Массаж как культура повседневной жизни здоровых людей, Вестник оздоровительной медицины, М.: 2010, №6
Разумов А.Н., Здоровье здорового человека. - М. “Медицина”, 2007
Разумов А.Н., Пономаренко В.А., Пискунов В.А. Здоровье здорового человека. М.: Медицина, 1996
Дубровский В.И., Валеология. Здоровый образ жизни. – М.: Retorika- A, 2001.
Разумов А.Н., Покровский В.И. Здоровье здорового человека, научные основы восстановительной медицины, М.: РАМН РНЦ ВМК, 2007
Заблудовский В.И., диссертация “Материалы к вопросу о действии массажа на здоровых людей”- СПб.: 1882 г
Golovin V.F. Robot for massage. Proceedings of JARP 2nd Workshop on Medical Robotics Heidelberg, Germany, 1997
Biodex system 3. Manual, 20 Ramsay Road, Shirley, New York 11967-4704
Ковражкина Е.А., Румянцева Н.А., Старицын А.Н., Суворов А.Ю., Иванова Г.Е., Скворцова В.И. Роботизированные механотренажеры в восстановлении функции ходьбы у больных с инсультом. // М.: Расмирби, №1 (24) 2008, с. 11-16.
Assistive technologies. Proceedings IARP, Workshop on medical robotics. Hidden Valley, Pennsylvania, USA, 2004
Rehabilitation robotics, Proceedings IARP, Workshop on medical robotics. Hidden Valley, Pennsylvania, USA, 2004
Мансуров О.И., Мансуров И.Я. Способ аппаратного поверхностного массажа и реализующий этот способ робот для шлейф-массажа. Рос.патент №2005130736/14 от 05.10.2005
Jones, Kenny C., Du, Winncy, “Development a Massage Robot for Medical Therapy,” Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM’03), July 23-26, 2003, Kobe, Japan, pp. 1096-1101
Golovin V.F., Grib A.N. Mechatronic system for manual therapy and massage. Proc. 8-th Mehatronics Forum International Conference, University of Twente, Netherlands, 2002
Golovin V.F. Robot for massage and mobilization. Proceedings of workshop of AMETMAS-NoE, Moscow, Russia, 1998
Golovin V.F., Grib A.N. Computer assisted robot for massage and mobilization. Proc. “Computer Science and Information Technologies”, Conference Greece University of Patras, 2002
Головин В.Ф., Саморуков А.Е. Способ массажа и устройство для его осуществления. Рос. патент № 2145833, 1998
Головин В.Ф. Мехатронная система для манипуляции на мягких тканях. / Мехатроника, автоматизация, управление. – М.: 2002, №7
Питкин М.Р. Биомеханика построения протезов нижних конечностей.-СПб.: Изд-во “Человек и здоровье”, 2006.-131с.
Конструкции протезно-ортопедических изделий. Под ред. Кужекина А.П. М. “Лёгкая и пищевая промышленность”, 1984
Якобсон Я. С., Морейнис И. Ш., Кужекин А.П. Конструкции протезно-ортопедических изделий /Под редакцией А.П. Кужекина. М., : Лёгкая и пищевая промышленность, 1984
Вукобратович М. Шагающие и антропоморфные механизмы. Изд.-во “Мир”, М. 1976
Слайд 2
Медицинская робототехника
Для восстановительной медицины и реабилитации Роботы для жизнеобеспечения Роботы для диагностики, терапии, хирургии Активные биоуправляемые протезы, экзоскелетоны Массаж точечный и классический, кресла Активные и пассивные движения конечностей в суставах Малоинвазивные для диагностики и хирургии Рентгеновский облучатель наноробот Телеуправление через интернет Перекладка, транспортировка Подвоз лекарств Передача инструментов хирургу поводырь Сервис для пожилых Автоматическая комната
Слайд 3
Робот “Lokomat” для выполнения движений конечностей в бедренных, коленных и голеностопных суставах.
Слайд 4
активный протез коленного сустава Активные протезы и экзоскелетоны
Слайд 5
протезы активные пассивные простейшие тяговые Миотонические биоэлектрические Без обратных связей С обратными связями тяговые
Слайд 6
робот Unimate Puma 560 Первый хирургический робот UnimatePuma 560 был создан в конце 1980-х в Америке. Этот робот, по сути, являлся большой рукой с двумя когтистыми отростками, которые могли врфащаться друг относительно друга. Амплитуда движений - 36 дюймов. Робот имел довольно ограниченный спектр движений, использовался в нейрохирургии для удерживания инструментов при проведении стереотаксической биопсии.
Слайд 7
В 1998 году появился активный робот ZEUS, предназначенный для дистанционной эндоскопической хирургии. Параллельно с ZEUS создавалась другая аналогичная система, получившая название DA VINCI. ZEUS
Слайд 8
HEXAPOD
Слайд 9
Робот по названием «Да Винчи»
Слайд 10
Робот Да Винчи - это прогрессивный хирургический робот, наиболее распространённый в мире. Робот приводится в движение врачом - хирургом и оснащён четырьмя "руками" - одна рука производит съёмку и три руки оперируют - эти руки обладают максимальной степенью свободы и подвижностью, лучшими, чем рука человека. Эти руки вводятся в операционное пространство на теле через тончайшие разрезы и обеспечивают врачу - хирургу не только дополнительные руки для оперирования, но и более совершенную свободу движений по сравнению с обычной операцией. Врач - хирург управляет операцией со своего пульта управления, находящегося около оперируемого пациента и с которого он приводит в движение оперирующие руки и управляет всем, что происходит в операционной.
Слайд 11
Преимущества использования данного прибора Робот обеспечивает хирургу максимальную степень свободы и более хорошую подвижность и, тем самым, даёт ему возможность осуществлять движения, которые человеческая рука не способна выполнять. Рука робота более крепкая и устойчивая, чем человеческая рука Изображение, которое передаёт камера хирургу - это увеличенное трёхмерное изображение, которое облегчает определение местоположения повреждения и его лечение Хирургическое вмешательство является менее инвазивным, чем при обычной операции, так как разрезы на брюшной стенке значительно меньше, чем разрезы при обычной операции Процесс восстановления более быстрый и количество дней пребывания в стационаре меньше Кровотечение из прооперированного участка минимальное и ранний послеоперационный период особенно короток
Слайд 12
Выполняемые операции * Восстановление митрального клапана * Реваскуляризация миокарда * Абляция тканей сердца * Установка эпикардиального электронного стимулятора сердца для бивентрикулярной ресинхронизации * Желудочное шунтирование * Фундопликация по Nissen * Гистерэктомия и миомэктомия * Операции на позвоночнике, замена дисков * Тимэктомия - операция по удалению вилочковой железы * Лобэктомия легкого * Эзофагоэктомия * Резекция опухоли средостения * Радикальная простатэктомия * Пиелопластика * Удаление мочевого пузыря * Радикальная нефрэктомия и резекция почки * Реимплантация мочеточника
Слайд 13
Посмотреть все слайды
В мировую медицину активно интегрируются искусственный интеллект и сложные методы автоматизации из робототехники. Применение роботов поднимает здравоохранение на новый уровень, оптимизируя ход лечения, отслеживания динамики, проведения анализа и хирургических операций. Ниже представлена подборка из 10 любопытных медицинских роботов, выпущенных на сегодняшний день.
Робот-ассистент da Vinci

Производитель: компания Intuitive Surgical, США.
Головной офис компании Intuitive Surgical, Inc. расположен в городе Саннивейл, штат Калифорния. Считается мировым лидером в роботической малоинвазивной хирургии.
Краткая справка о роботе
Робот da Vinci разработан как вспомогательный инструмент для хирургов. Робот не запрограммирован под самостоятельное проведение операции, поскольку процедура и ход операции контролируются человеком дистанционно. Робот использует специальные инструменты, включая миниатюрные камеры для визуализации и стандартные инструменты (т.е. ножницы, скальпели и пинцеты), разработанные для точной диссекции при проведении полостных операций.
За 2016 год было проведено 750 000 операций с помощью da Vinci. С момента выпуска робота – 4 000 000. По состоянию на 31 декабря 2016 года в мире было установлено 3919 систем. В России – 26 систем во всех крупных городах. Создатели робота da Vinci нацелены на решение ряда проблем в хирургии. Во-первых, улучшенное качество изображения (в 3D), которое помогает хирургам и персоналу преодолеть ограничения невооруженного глаза при идентификации тканевых структур при операции. Во-вторых, внедрение интеллектуальных систем. Современные датчики, обеспечивающие одновременную обратную связь, упрощают выявление тканевых структур как источника осложнений и вариабельности.
Робот Preceyes
Производитель: компания Preceyes B.V., Голландия.
Головной офис компании Preceyes B.V. расположен в городе Эйндховен, провинция Северный Брабант. Целью компании считается развитие новых высокоточных методов терапии и облегчение способов проведения витреоретинальной хирургии.
Робот Preceyes разработан как деликатное роботизированное решение для помощи хирургам-офтальмологам при проведении операции. Робот не запрограммирован под самостоятельное проведение операции, поскольку процедура и ход операции контролируются человеком дистанционно – через сенсорный экран и джойстик. Компания Preceyes B.V. ставит еще одной своей целью повышение профессионализма хирургов, а не замену человека машиной.
Краткая справка о роботе
Первая операция с использованием робота Preceyes прошла в оксфордской клинике Джона Рэдклиффа в Великобритании в 2016 году. Создатели робота Preceyes нацелены на решение ряда проблем в хирургии:
- смягчение резких неосторожных движений хирурга, что помогает хирургу исключить повреждения внутренних органов;
- повышенная точность. Точность движений робота – 1 на 1000 долей миллиметра.
Робот Veebot
Производитель: стартап Veebot, США.
Информация о головном офисе отсутствует. Целью компании считается предоставление точного и непродолжительного забора крови у пациента с автоматизацией процесса и проведением инфузионной терапии.
Краткая справка о роботе
Робот Veebot пока проходит испытания и демонстрирует выбор места введения иглы в 83% случаев. Создатели машины заявляют о планах повысить результат до 90% перед проведением первых клинических испытаний. Для зажатия и улучшения визуализации вен робот оснащен рукавом. Также для улучшения видимости вен применяются инфракрасные и звуковые датчики, вид с камеры и четкий алгоритм для определения места, наклона и глубины введения иглы.
Робот SurgiBot

Производитель: компания TransEnterix, США.
Головной офис компании TransEnterix находится в городе Моррисвилль, штат Северная Каролина. Компания считается пионером в области применения робототехники для повышения качества малоинвазивной хирургии. Также компания нацелена на решение клинических и экономических сложностей при проведении лапароскопии.
Краткая справка о роботе
Роботизированная система SurgiBot TM разработана как малоинвазивная платформа с применением инструментов в ходе единичного рассечения. Применение гибких инструментов при операции контролируется хирургом из стерильного поля. Робот оснащен щупами, регулятором чувствительности управляющих ручек и камерой с фонариком, которая выводит изображение хода процесса на стандартный монитор.
Робот SurgiBot пока не доступен для покупки.
Робот Smart Tissue Autonomous Robot (STAR), США

Производитель: "Национальный детский медицинский центр" (Children"s National Medical Center), город Вашингтон, округ Колумбия. Ученые-разработчики нацелены на создание высокоточного робота для автономных операций на мягких тканях.
Краткая справка о роботе
Робот STAR основан на работе технологии NVIDIA GeForce GTX TITAN GPU с применением механической руки, с 3D-камерой, машинным зрением в ближнем диапазоне инфракрасных волн и биомаркерами для четкой ориентации в оперируемой полости.
Система Robodoc

Производитель: компания Curexo Technology Corporation, США.
Головной офис компании Curexo Technology Corporation расположен в городе Фремонт, штат Калифорния. Миссия компании заключается в повышении заботы о пациентах посредством работы над качеством и создания точных роботизированных платформ.
Краткая справка о роботе
На территории США, Европы, Японии, Кореи и Индии при помощи Robodoc было проведено 28000 операций по замене суставов.
Работа с роботом включает два этапа: планирование и составление плана перед операцией. В ходе первого этапа пациент проходит КТ-сканирование для получения и вывода изображения на 4 рабочих окна, составляющих один экран. После выбора и анализа точной анатомической структуры импланта из базы идет планирование операции с передачей информации на вспомогательный механизм ROBODOС Surgical Assistant. Робот оснащен фиксаторами и специальным регистратором DigiMatch, формирующим точное изображение картины костной ткани в пространстве.
Auris Robotic Endoscopy System (ARES)
Производитель: компания Auris Surgical Robotics, США.
Головной офис компании Auris Surgical Robotics расположен в Силиконовой долине. Компания нацелена на создание нового поколения хирургических роботов, способных расширить сферу применения специализированных платформ для проведения медицинских процедур.
Краткая справка о роботе
В конце 2014 года было проведено клиническое исследование с участием пациентов с подозрением развития рака. Типы хирургических операции проводятся за счет взаимозаменяемости механических рук робота с инструментами и гибкого эндоскопа. Среди инструментов отмечены лазеры, пинцеты, иглы и скальпели, при помощи которых хирург проведет биопсию, операцию по восстановлению слизистой желудка и иссечение опухолей. Робот не запрограммирован под самостоятельное проведение операции, поскольку процедура и ход операции контролируются человеком дистанционно через рабочую станцию на рабочем столе компьютера.
Роботизированная установка CorPath 200
Производитель: компания Corindus Vascular Robotics, США.
Головной офис компании Corindus Vascular Robotics расположен в городе Уолтем, штат Массачуссетс. Компания считается мировым лидером в области роботизированной сердечно-сосудистой хирургии.
Краткая справка о роботе
Роботизированная установка CorPath 200 предназначена для коронарной ангиопластики с расширением суженных или заблокированных артерий. Стандартное проведение операции допускает риск облучения из-за рентгена. Установка не запрограммирована под самостоятельное проведение операции, поскольку процедура и ход операции контролируются человеком дистанционно через джойстик. Удаленный контроль уточняет движение катетера и повышает безопасность пациента.
Магнитные микророботы

Производитель: Федеральная политехническая школа Лозанны (EPFL), Франция, и Eidgenössische Technische Hochschule Zürich (ETHZ), Швейцария.
Краткая справка о роботе
Магнитные микророботы предназначены для точечной доставки лекарственных веществ в организм пациента. Структура микроробота имитирует тело червя Trypanosoma brucei, который передвигается при помощи регулярного сжатия придатка-жгутика. Использование биосовместимого гидрогеля и магнитных наночастиц делает микророботов безмоторными, гибкими и мягкими. Управление проходит через электромагнитное поле, которое преобразует магнитные наночастицы в крепления и инициируют движение микроробота.

Страна-производитель: компания Medtech S.A., Франция.
Головной офис компании Medtech расположен в городе Монпелье. Миссия компании заключается в создании отношений, инструментов и программ, нацеленных на внедрение передовых медицинских решений на рынок медицинских услуг.
Краткая справка о роботе
Робот Rosa разработан для результативности и безопасности хирургических операций по неврологии. Робот Rosa – единственный роботизированный механизм, который прошел одобрение на проведение неврологических операций на территории Европы, США и Канады. Механизм работает по принципу GPS для черепа в ходе краниальных операций, требующих хирургического планирования на основании предоперационной информации, точной анатомии пациента и управления инструментами. Робот Rosa включает нейронавигационную станцию и высокоточный манипулятор, которые повышают безопасность и скорость точных нейрохирургических операций.
Профессор Дмитрий Пушкарь говорит: "Роботизированная хирургия стала настоящим переворотом в медицине. Робот da Vinci изменил качество хирургии во всем мире".
Применение роботов в медицине аналогично революции, которая предвосхищает тесное взаимодействие человека и технологий. Благодаря автоматизации снижается роль человеческого фактора, приводящего к ошибкам врачей, а лечение становится доступнее.
Фото: roboticsbusinessreview.com
Похожие статьи
-
Великая отечественная война Окончательное снятие блокады Ленинграда
Великая Отечественная война - война СССР с Германией и ее союзниками в – годах и с Японией в 1945 году; составная часть Второй мировой войны . С точки зрения руководства нацистской Германии, война с СССР была неизбежна. Коммунистический...
-
Под знаком зодиака Дева, были рождены прославленные люди
Действительное описание — даты календаря 31 августа.Астрологический символ людей родившихся в день 31.08.90 года ›››› Дева (с 22 августа по 23 сентября).Восточный календарь, 1990 год = ››› Белой Металлической Лошади.Стихия знака гороскопа...
-
КВР: расшифровка. Что означает КВР? Какие квр и косгу использовать для госзакупок Квр 243 расшифровка в году
Комбинация КВР - КОСГУ имеет закрытый перечень. Использование иных сочетаний может стать причиной нарушения методологии учета. А значит, и штрафных санкций. Узнайте, как без ошибок увязать КВР и КОСГУ. КВР и КОСГУ по страховым взносам...
-
Значение слова посредник Кто такой посредник
Слово «посредник», наверное, слышали все. Здесь буду говорить о посредниках в торговле. Если вам больше 15 лет, то наверняка вы знаете, что очень редко товары доходят до нас «напрямую» с производства. В 90% случаев между производителем и...
-
Русский консерватизм первой четверти XIX века Идеология консерватизма в 19 веке
Консерватизм возник как непосредственная реак-ция на Великую французскую революцию. В Велико-британии его основоположником стал Эдмунд Бёрк (1729-1797), известный политический деятель и один из самых оригинальных мыслителей своего...
-
Вольфганг Шойбле (Wolfgang Schaeuble) - это Предложение о создании конкурента МВФ
(Wolfgang Schäuble), занимавший в уходящем правительстве пост министра финансов. За его кандидатуру, предложенную главой крупнейшей фракции Христианско-демократического и Христианско-социального союзов (ХДС/ХСС) Фолькером Каудером (Volker...